About the Project
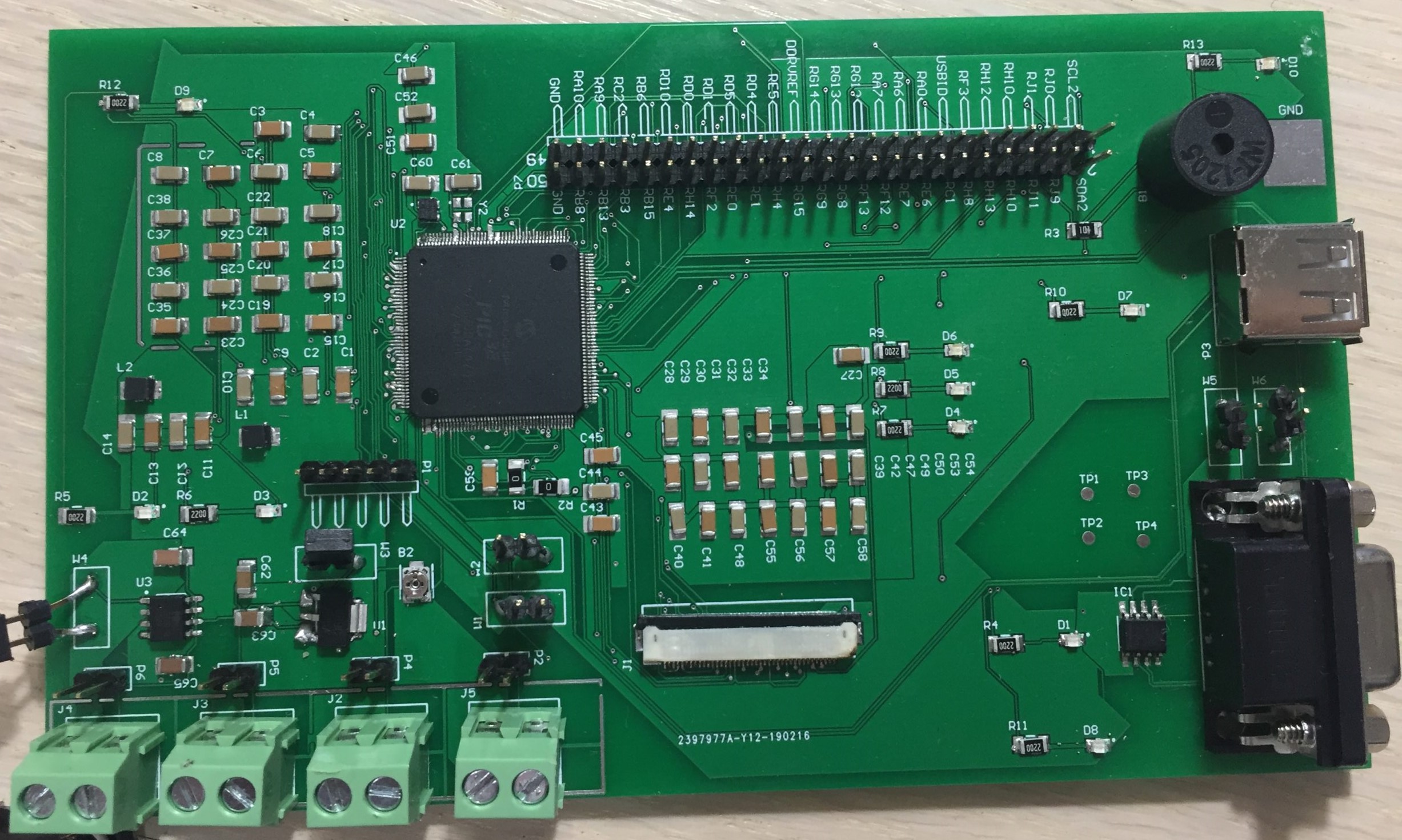
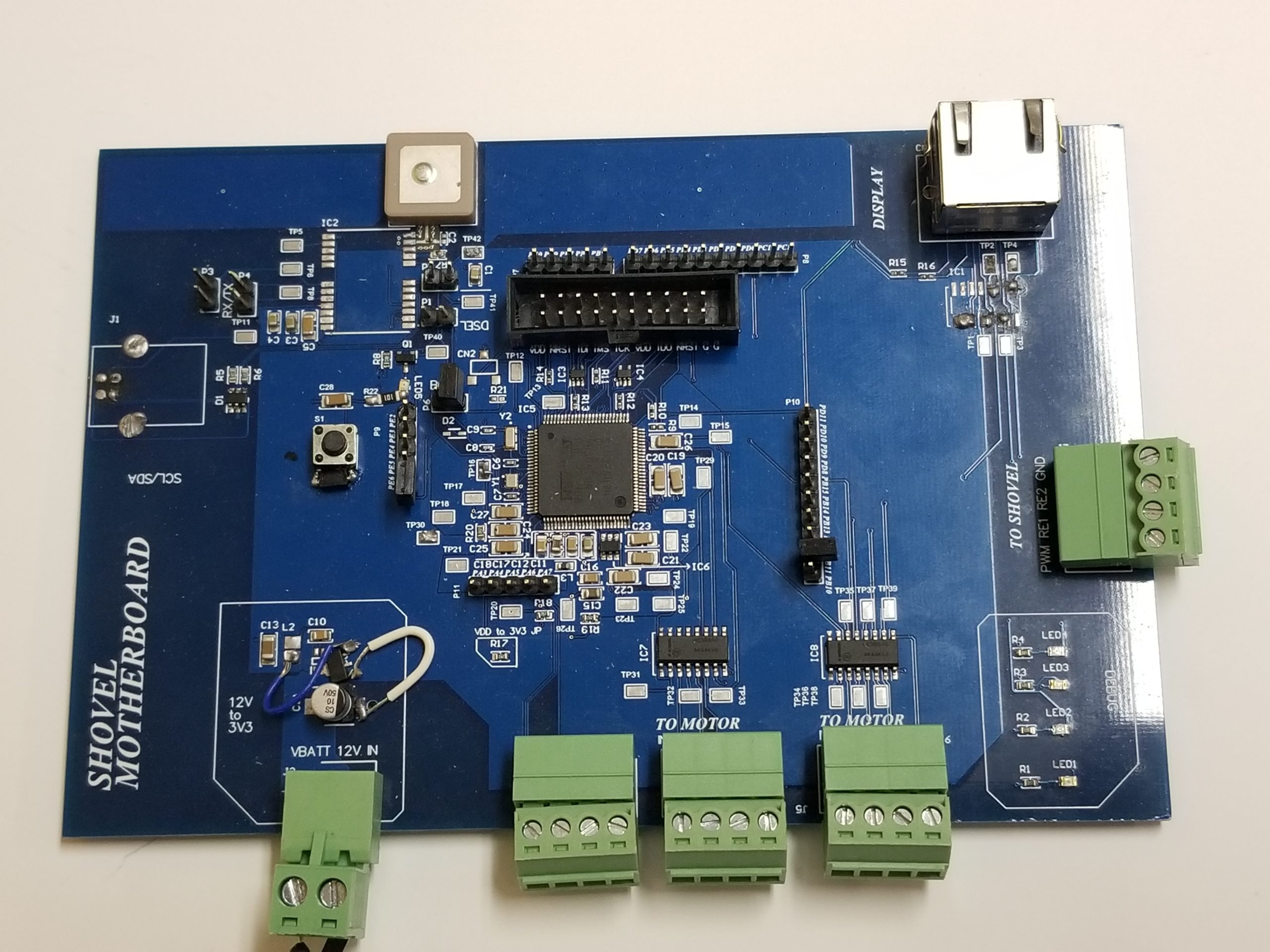
Some applications require high precision control over remote locations. Typical examples include unmanned vehicles. To address this issue a high precision GNSS module is needed coupled with high speed digital signal processing. U-blox NEO-M8 was the candidate of choice here due to many reasons namely: - Use of multiple GNSS systems means better reliability and portability globally. - Sensitivity of up to -167 dBm ensures good precision for an unmanned vehicle application. In real life an accuracy of about 15 cm was observed. - Can directly interface with an MCU using UART/SPI and I2C - Sleep mode with interrupt pin available to conserve power, especially when it's being operated in battery mode. The PCB also uses a patch type antenna for the GNSS which in turn reduces time to design as microstrip/stripline antennas can require tuning to get right. At it's core an STM32G processor is used and it interfaces an I2C protocol for an a monochrome LCD, a buffered output for a brushed motor driving, and a set of GPIOs that uses a ribbon cable to interface with a control panel. The circuit is powered using 12V and the voltage is split to regulated 12V and 3.3V. A set of debugging LEDs (Red, Green, Blue and Orange) are placed on the right sied. The USB Type B interface is used to upgrade the firmware on the NEO-M8 using a PC directly without the interaction of the MCU. The traces of the USB are differential and impedance controlled.
-
ProjectAutomated Shoveler
-
Year2021
-
RoleEngineer