About the Project
Inertial Measurement Unit (IMU) are prevailing electronic devices that are integrated into many applications today. Examples include roll detection in vehicles, hearables, smart clothes and smart watches on your wrist.
The portability of these devices mean that modern IMUs must integrate so much performance into such a tiny package. The minimum expectations include precision gyroscopes, accelerators and magnetometers. The most important feature is having an ultra-low battery consumption as batteries in wearable are already considerably smaller than in other applications.
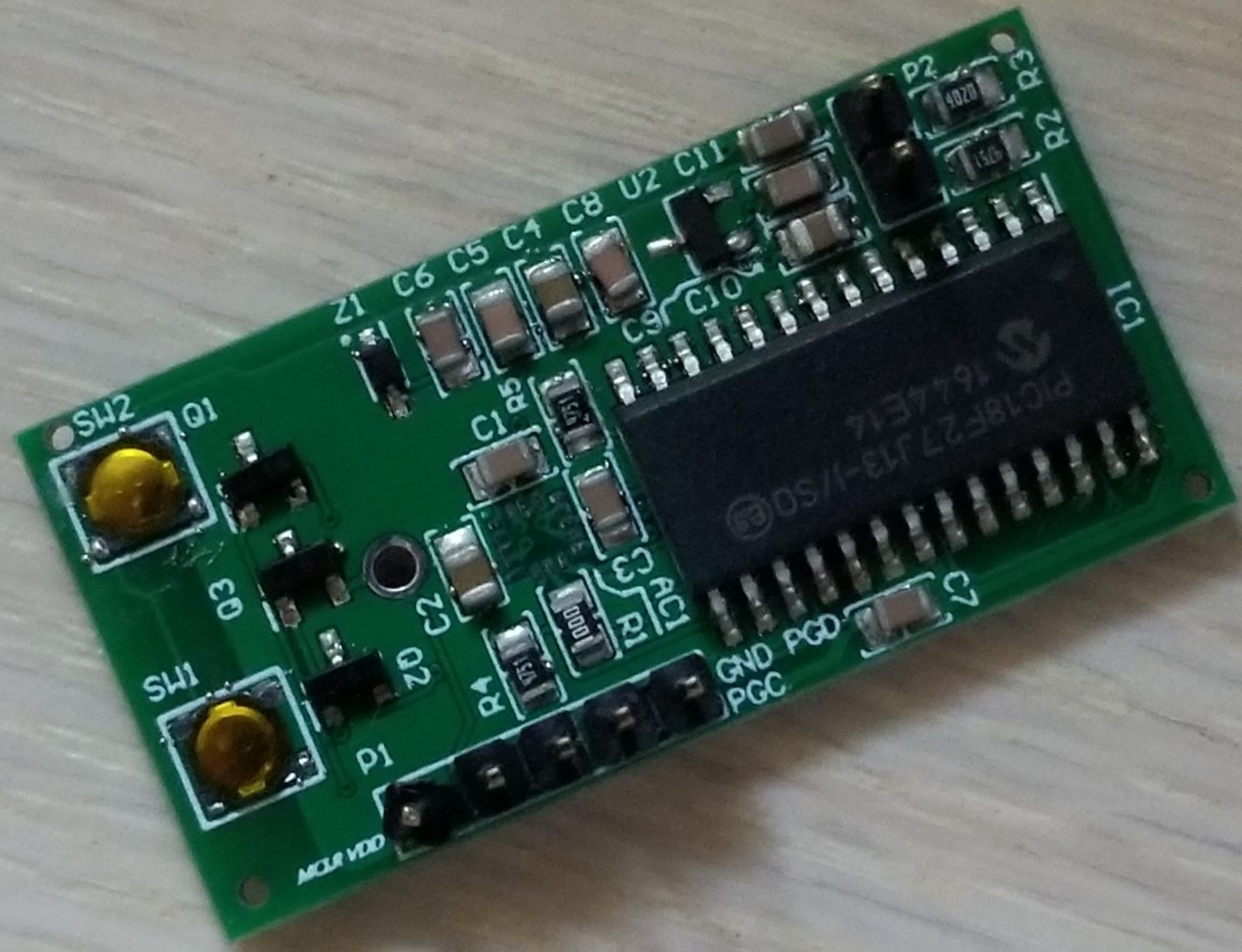
In this project an IMU PoC board is made with the following:- IMU (AIS1120SX) which measures +/- 120g in the X-axis
- PIC18F is used for I2C communication with the MCU at standard rate of 100KHz.
- The devices are powered using a CR2032 battery
- A 5-pin detachable programming header
- Two user customization buttons
- Reverse polarity protection mechanism of the device.
The device is "smart" in a sense it is able to auto-sleep and auto-run given the conditions of the environment. This way the battery life is prolonged and the user doesn't have to worry about turning the device ON/OFF. The device in sleep mode consumes only 90nA as both the MCU and the IMU go into a deep sleep state. The MCU is interrupt driven by the the IMU.
-
ProjectUltra-low power IMU
-
Year2022
-
RoleEngineer
